首页 > Python资料 博客日记
深入探讨基于python的SGBM参数影响效果
2024-05-28 20:00:04Python资料围观188次
什么是SGBM
SGBM(Semi-Global Block Matching)是一种用于计算双目视觉中视差(disparity)的半全局匹配算法,在OpenCV中的实现为semi-global block matching(SGBM)。它是基于全局匹配算法和局部匹配算法的优缺点,提出了一种折中的方法,既能保证视差图的质量,又能降低计算复杂度。
SGBM的原理
SGBM的原理可以分为以下几个步骤:
- 预处理:使用水平Sobel算子对左右图像进行边缘检测,得到梯度图像。
- 匹配代价计算:对于每个像素,计算其在不同视差下与对应像素的匹配代价,通常使用绝对差或平方差作为代价函数。
- 能量函数最小化:对于每个像素,定义一个能量函数,包括数据项和平滑项。数据项表示匹配代价,平滑项表示相邻像素的视差连续性。使用动态规划的方法,沿着多个方向(通常为8个或16个)计算累积代价,并求取最小值作为最终代价。
- 视差图生成:对于每个像素,根据最终代价选择最佳视差,并生成视差图。
- 视差图后处理:对于视差图中的异常值或空洞,使用一些后处理方法进行修复或填充,例如中值滤波、WLS滤波等。
SGBM的参数
SGBM的参数有以下几个:
- minDisparity:最小视差值,默认为0。
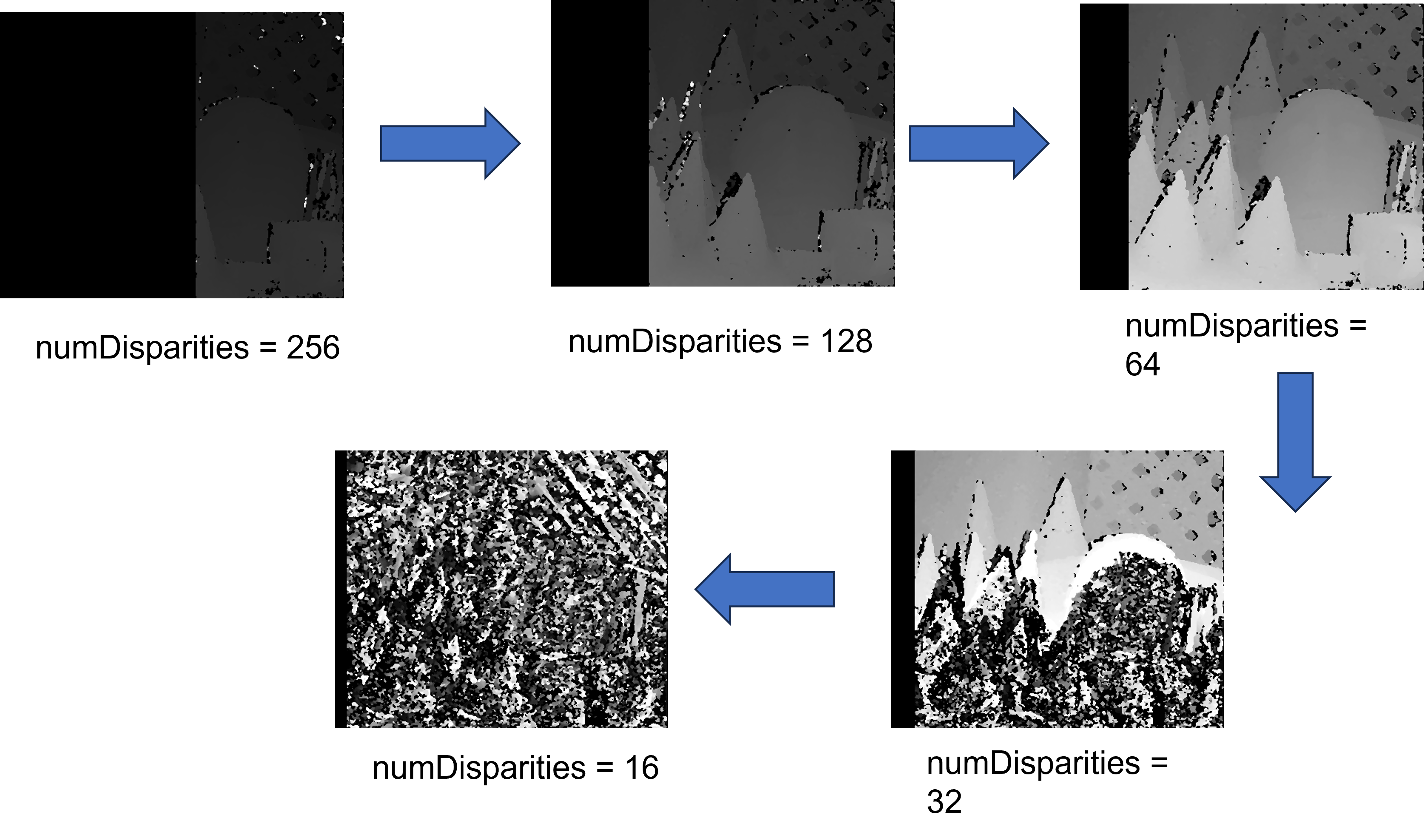
- numDisparities:视差范围,默认为16。必须是16的整数倍。
- blockSize:匹配块大小,默认为3。必须是奇数且大于1。
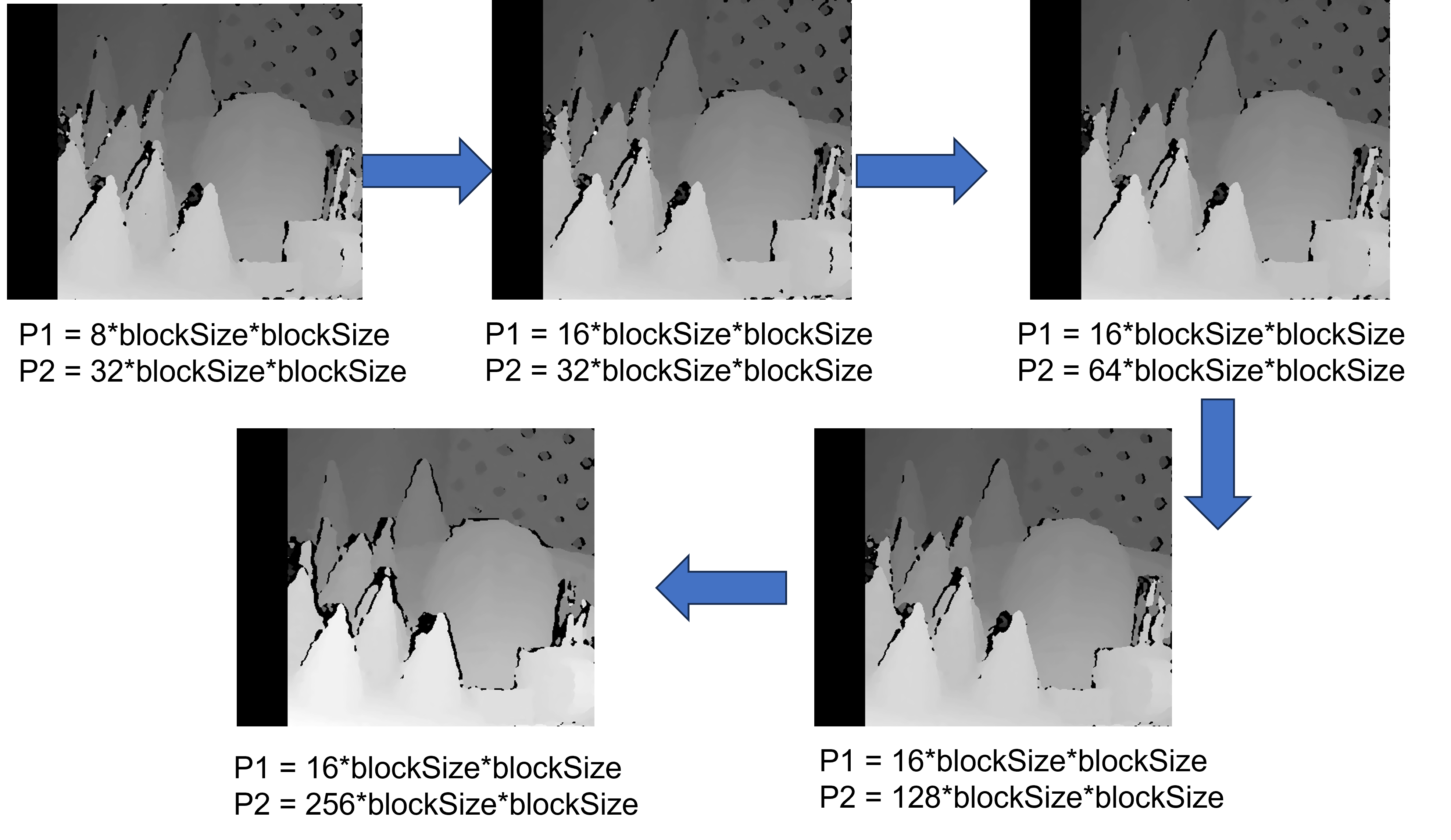
- P1:控制视差平滑度的第一个参数,默认为8blockSizeblockSize。P1越大,越倾向于生成连续的视差图。
- P2:控制视差平滑度的第二个参数,默认为32blockSizeblockSize。P2越大,越倾向于消除小的视差变化。P2必须大于P1。
- disp12MaxDiff:左右一致性检查时允许的最大视差差异,默认为-1,表示不进行检查。
- preFilterCap:预处理时截断梯度值的上限,默认为63。
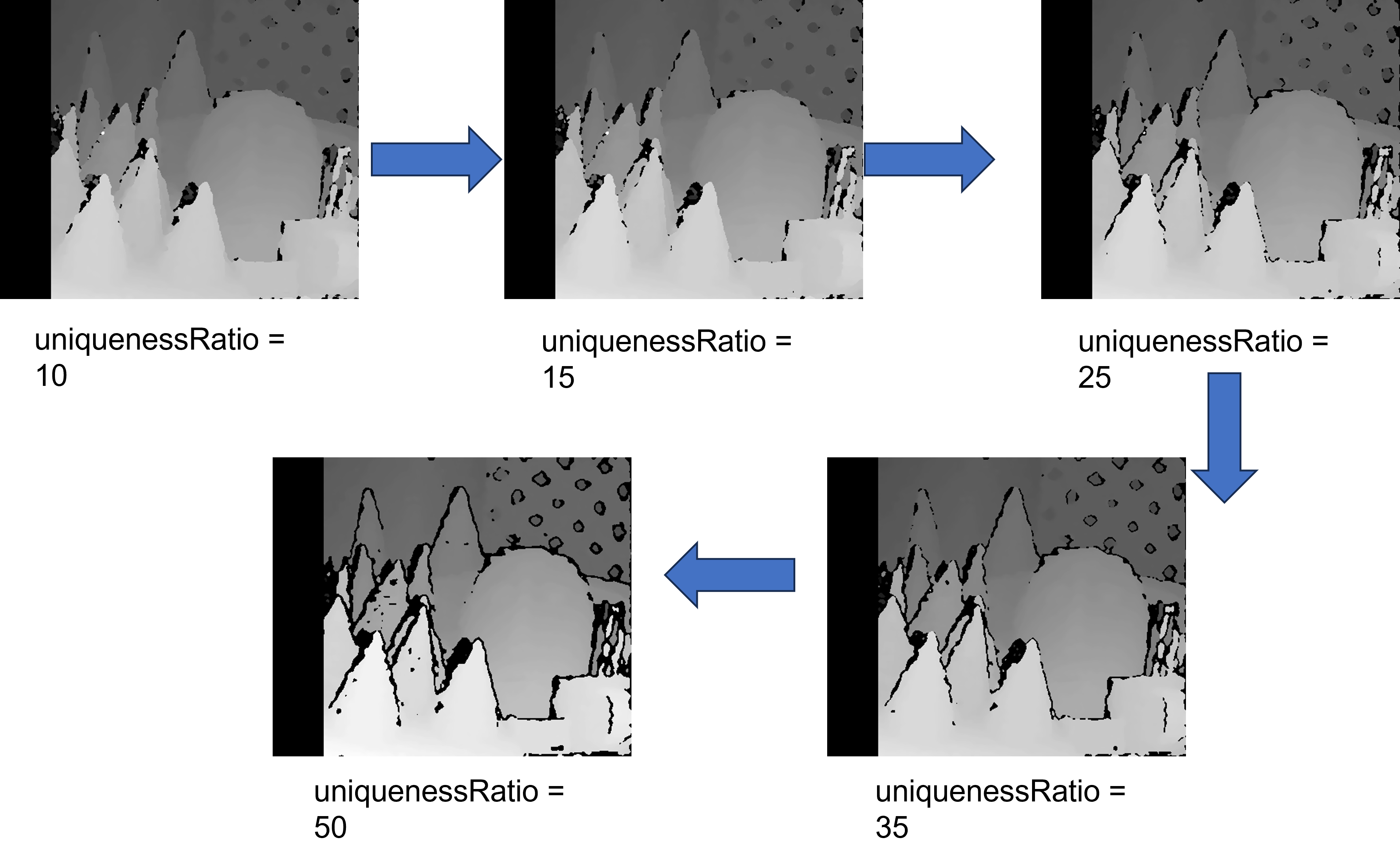
- uniquenessRatio:唯一性检查时的阈值,默认为10。表示最佳视差值与次佳视差值之间的比例要大于该阈值才被认为是有效的。
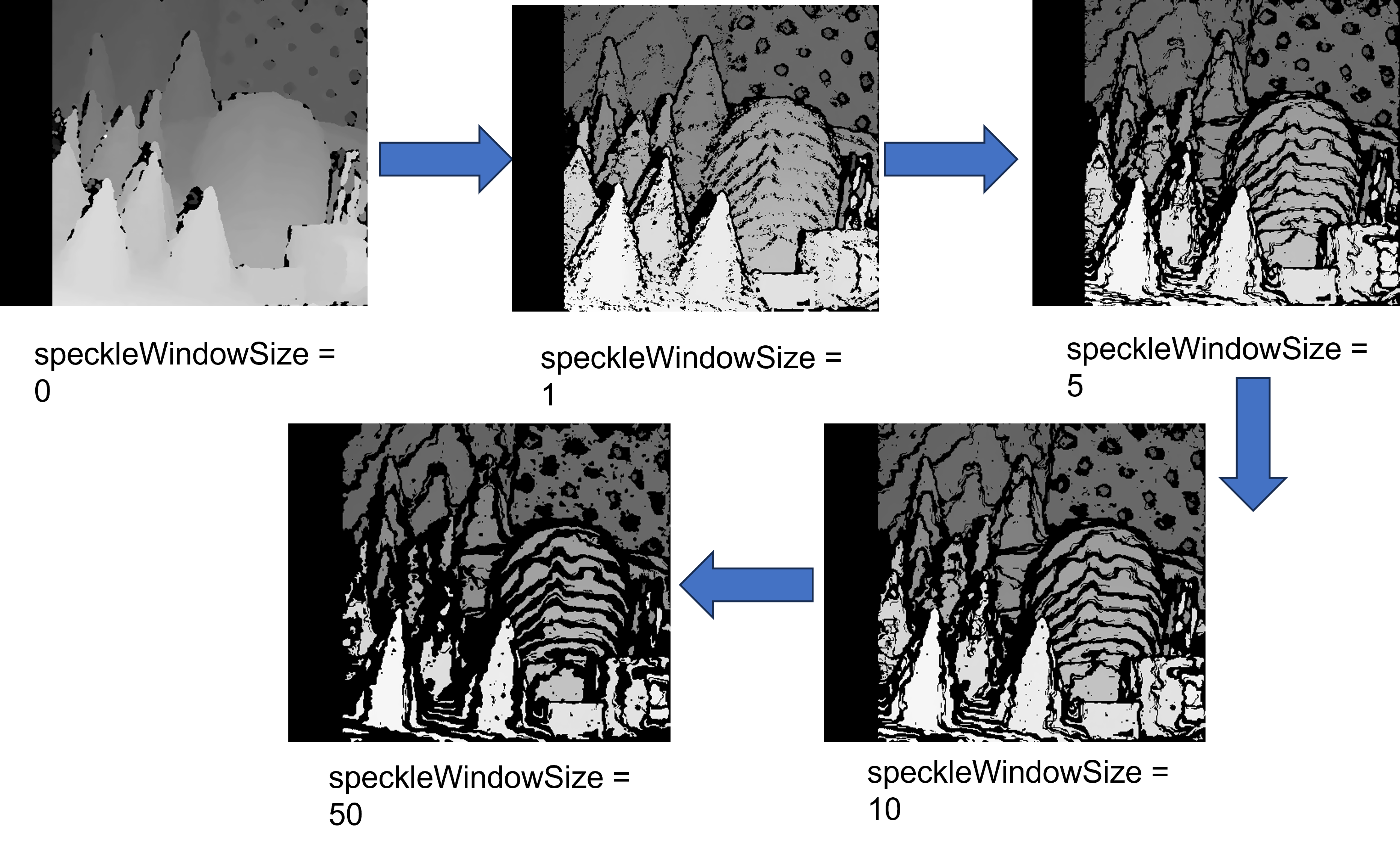
- speckleWindowSize:消除噪声斑点时考虑的窗口大小,默认为0,表示不进行消除。
- speckleRange:消除噪声斑点时考虑的最大视差变化,默认为0,表示不进行消除。
- mode:SGBM算法选择模式,默认为StereoSGBM::MODE_SGBM。可选值有StereoSGBM::MODE_SGBM_3WAY(速度快)、StereoSGBM::MODE_HH4(速度慢)、StereoSGBM::MODE_SGBM(速度中等)、StereoSGBM::MODE_HH(速度慢)。
SGBM的参数变化
下面通过调整每个参数来观察其影响效果:
初始值设置:
minDisparity = 0
numDisparities = 16
blockSize = 3
P1 = 8*blockSize*blockSize
P2 = 32*blockSize*blockSize
disp12MaxDiff = -1
preFilterCap = 63
uniquenessRatio = 10
speckleWindowSize = 0
speckleRange = 0
numDisparities: 视差数量越多,能够获取到更多详细的深度信息。但是,增加视差数量也会增加计算量,可能会导致较慢的运行速度以及噪声增多,且增大numDisparities会扩大视差范围,即视差图中可以估计的深度范围增大。如果增大的视差范围超过了场景中实际的深度范围,就会出现黑色区域。黑色区域表示无法进行有效的匹配或估计深度。

minDisparity: 最小视差越大,物体离相机近的程度就会变小。如果提高最小视差,则可能会使视差图被高估,因为物体不可能有大于最小视差的负的视差值。而如果最小视差过低,则可能会受到噪声的影响,产生错误的视差值。
blockSize: 所选的窗口大小越大,所包含的像素就越多,从而产生更稳定,但粗略的视差图。减小块大小,可以获得反之,一些锐利但可能嘈杂(即不确定)的视差边缘。

P1 和 P2: 两种参数都是控制视差变化规则的,从而使结果更平滑,增加这些值会使抗噪声能力更强但同时会失去保留锐度的细节。如果P1和P2参数值过小,则会使视差图中出现许多噪声或未对齐的图像。如果参数值太高,将导致平滑的结果,丢失更多的细节和锐度。
disp12MaxDiff: 这个参数用于限制左右视图之间的最大视差数量差异。增加这个值可能会导致插值和未对齐的像素点在图像中显示。但太小的值,则视差较光滑,缺少细节特征。

uniquenessRatio: 这个参数是用来控制像素值的唯一性,如果唯一性比例越高,则得到的视差图的噪声和未对齐的像素会越小。但如果唯一性比例太高,则有可能会失去细节特征。
speckleWindowSize: 这个参数被用来滤除孤立噪点或者离群值,如果窗口太小,则没有过滤到足够的噪声点而窗口太大则会损失一些细节特征。
speckleRange: 这个参数规定一个视差变化的阈值,如果发现视差变化超出了这个阈值,则这个像素应该是一些无用的孤立像素。适当调整该参数可以使其过滤掉孤立的杂点和噪声。

preFilterCap: 该参数控制了像素的最大值。如果已经将值限制在负值的范围内,那么它必须和像素值相比较,过滤掉那些值过大的像素点。

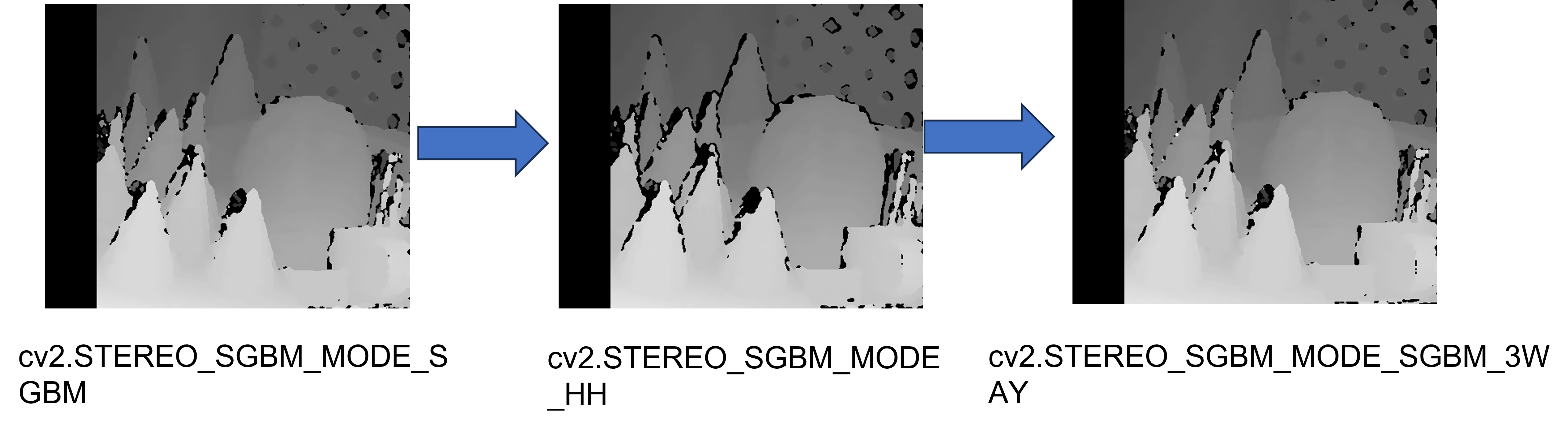
mode: SGBM算法的解释模式,分别为SGBM,HHSGBM和SGBM_3WAY。这些模式包含了不同的参数设定,也会影响到视差图的效果。
- SGBM:这是默认的解释模式,也是最常用的模式。它代表了Semi-Global Block Matching (SGBM) 算法,该算法利用全局视差的一致性来获得更准确的视差图。
- HHSGBM:这代表了H.Hirschmüller的快速近似SGBM算法(H.Hirschmüller’s Hierarchical Semi-Global Block Matching),是一种更快速的算法。它在速度上相对于标准SGBM算法有所优化,但可能在某些情况下会牺牲一些准确性。
- SGBM_3WAY:这是一种三通道SGBM算法,它将输入图像的三个通道(BGR)分别作为独立的视差图像进行处理。然后,将三个视差图像中的像素最小化,从而得到最终的视差图。这种方法可以改善处理彩色图像时的准确性。
原文链接SGBM你不知道的秘密:深入探讨SGBM参数影响效果
本来是想开通一个付费下载,一块两块啥的,官方设置最低9.9,索性算了,链接已经0积分下载了,大家有钱的捧个钱场,没钱的捧个人场吧!
还是希望大家觉得有用,可以打赏一下小弟!感谢!!!
点击获取源码!SGBM
标签:
相关文章
最新发布
- 光流法结合深度学习神经网络的原理及应用(完整代码都有Python opencv)
- Python 图像处理进阶:特征提取与图像分类
- 大数据可视化分析-基于python的电影数据分析及可视化系统_9532dr50
- 【Python】入门(运算、输出、数据类型)
- 【Python】第一弹---解锁编程新世界:深入理解计算机基础与Python入门指南
- 华为OD机试E卷 --第k个排列 --24年OD统一考试(Java & JS & Python & C & C++)
- Python已安装包在import时报错未找到的解决方法
- 【Python】自动化神器PyAutoGUI —告别手动操作,一键模拟鼠标键盘,玩转微信及各种软件自动化
- Pycharm连接SQL Sever(详细教程)
- Python编程练习题及解析(49题)
点击排行
- 版本匹配指南:Numpy版本和Python版本的对应关系
- 版本匹配指南:PyTorch版本、torchvision 版本和Python版本的对应关系
- Anaconda版本和Python版本对应关系(持续更新...)
- Python 可视化 web 神器:streamlit、Gradio、dash、nicegui;低代码 Python Web 框架:PyWebIO
- 相关性分析——Pearson相关系数+热力图(附data和Python完整代码)
- Python与PyTorch的版本对应
- Windows上安装 Python 环境并配置环境变量 (超详细教程)
- Python pyinstaller打包exe最完整教程
本站推荐
