首页 > Python资料 博客日记
第十四篇【传奇开心果系列】Python的OpenCV库技术点案例示例:图像特征提取与描述
2024-02-28 07:00:08Python资料围观555次
传奇开心果短博文系列
- 系列短博文目录
- Python的OpenCV库技术点案例示例系列
- 短博文目录
- 前言
- 一、OpenCV图像特征提取与描述介绍
- 二、OpenCV图像特征提取与描述初步示例代码
- 三、扩展思路介绍
- 四、特征点筛选和匹配优化示例代码
- 五、多尺度特征提取示例代码
- 六、非局部特征描述子示例代码
- 七、基于深度学习的特征提取示例代码
- 八、自定义特征提取示例代码
- 九、归纳总结
系列短博文目录
Python的OpenCV库技术点案例示例系列
短博文目录
前言
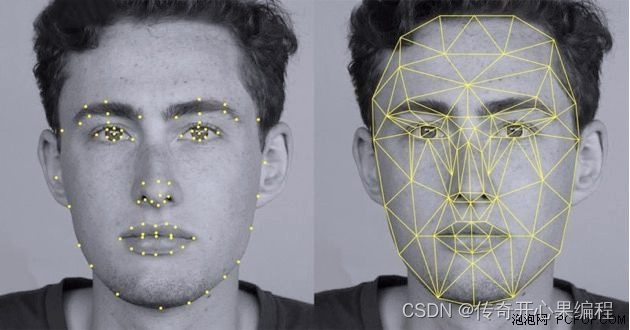
 OpenCV图像特征提取与描述:OpenCV是一个广泛应用于计算机视觉和图像处理领域的开源库,提供了丰富的图像特征提取和描述的功能。包括提取图像特征点、计算特征描述子等功能。
OpenCV图像特征提取与描述:OpenCV是一个广泛应用于计算机视觉和图像处理领域的开源库,提供了丰富的图像特征提取和描述的功能。包括提取图像特征点、计算特征描述子等功能。
通过使用OpenCV的图像特征提取与描述功能,我们可以从图像中提取出有意义的特征点,并计算出对应的特征描述子。这些特征点和描述子可以应用于许多计算机视觉任务,如目标检测、图像拼接、三维重建等。
一、OpenCV图像特征提取与描述介绍
 下面是一些常见的图像特征提取与描述的功能介绍:
下面是一些常见的图像特征提取与描述的功能介绍:
-
特征点检测:特征点是图像中具有显著变化的局部区域,例如角点、边缘等。OpenCV提供了多种特征点检测算法,包括Harris角点检测、Shi-Tomasi角点检测、FAST角点检测等。
-
特征描述子计算:特征描述子是对特征点周围区域的描述,用于表示特征点的局部特征信息。OpenCV支持多种特征描述子计算方法,如SIFT、SURF、ORB、BRISK等。这些方法可以计算出一个向量或矩阵,用于表示特征点的局部特征。
-
特征匹配:特征匹配是指在不同图像中寻找相似的特征点对应关系。OpenCV提供了多种特征匹配算法,如基于距离的最近邻匹配、基于比值测试的匹配筛选等。
-
特征跟踪:特征跟踪是指在视频序列中追踪特征点的运动轨迹。OpenCV提供了多种特征跟踪算法,如Lucas-Kanade光流法、稀疏光流法等。
-
特征匹配筛选和优化:在进行特征匹配后,通常需要对匹配结果进行筛选和优化,以提高匹配的准确性和鲁棒性。OpenCV提供了一些方法,如RANSAC算法、最小二乘法等。
二、OpenCV图像特征提取与描述初步示例代码
 下面是一个简单示例代码,展示如何使用OpenCV提取图像特征点和计算特征描述子:
下面是一个简单示例代码,展示如何使用OpenCV提取图像特征点和计算特征描述子:
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 创建特征点检测器
detector = cv2.FeatureDetector_create("ORB")
# 检测特征点
keypoints = detector.detect(image)
# 创建特征描述子计算器
descriptor = cv2.DescriptorExtractor_create("ORB")
# 计算特征描述子
keypoints, descriptors = descriptor.compute(image, keypoints)
# 显示特征点
image_with_keypoints = cv2.drawKeypoints(image, keypoints, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv2.imshow('Image with Keypoints', image_with_keypoints)
cv2.waitKey(0)
cv2.destroyAllWindows()
以上代码中,首先读取图像,并创建特征点检测器和特征描述子计算器。然后使用特征点检测器检测图像中的特征点,再利用特征描述子计算器计算特征描述子。最后,将特征点绘制在图像上并显示出来。
需要注意的是,不同的特征点检测器和特征描述子计算器具有不同的参数设置和使用方式,请根据实际需求进行调整。此外,为了使用OpenCV的特征提取和描述功能,需要安装OpenCV库并正确配置环境。
三、扩展思路介绍
 当涉及到图像特征提取和描述时,OpenCV提供许多其他功能和方法,可以进一步扩展应用。以下是一些扩展的方向:
当涉及到图像特征提取和描述时,OpenCV提供许多其他功能和方法,可以进一步扩展应用。以下是一些扩展的方向:
-
特征点筛选和匹配优化:在进行特征匹配之前,可以使用不同的筛选方法来排除错误匹配或不可靠的特征点。例如,使用RANSAC算法进行外点剔除,或者通过比较特征描述子之间的相似性进行匹配筛选。
-
多尺度特征提取:OpenCV提供了多种多尺度特征提取方法,如金字塔SIFT和SURF。这些方法可以在不同尺度上提取特征点,并计算对应的特征描述子,从而增强对尺度变化的鲁棒性。
-
非局部特征描述子:除了局部特征描述子(如SIFT、SURF、ORB)之外,OpenCV还支持一些非局部特征描述子,如Bag-of-Features(BoF)和Fisher Vectors。这些描述子可以更好地捕捉整体图像的特征信息,适用于图像分类和检索任务。
-
基于深度学习的特征提取:随着深度学习的发展,基于卷积神经网络(CNN)的特征提取方法在图像处理中得到了广泛应用。OpenCV提供了与深度学习框架的集成,可以使用预训练的CNN模型来提取图像特征。例如,可以使用OpenCV的DNN模块加载和使用已经训练好的网络模型,如VGG、ResNet等。
-
自定义特征提取:除了使用OpenCV提供的预定义特征点检测器和描述子计算器,您还可以根据自己的需求开发和实现自定义的特征提取算法。OpenCV提供了丰富的图像处理函数和工具,可以帮助您进行图像分析和特征提取的开发。
以上只是一些扩展方向的简要介绍,实际应用中还有更多技术和方法可供探索。通过灵活运用OpenCV的功能和工具,可以实现各种图像特征提取和描述的需求。
四、特征点筛选和匹配优化示例代码
 特征点筛选和匹配优化是在进行特征匹配之前或之后,对特征点进行进一步处理以提高匹配准确性的步骤。以下是一个示例代码,展示了如何使用RANSAC算法进行特征匹配的外点剔除:
特征点筛选和匹配优化是在进行特征匹配之前或之后,对特征点进行进一步处理以提高匹配准确性的步骤。以下是一个示例代码,展示了如何使用RANSAC算法进行特征匹配的外点剔除:
import cv2
import numpy as np
# 读取两张图像
image1 = cv2.imread('image1.jpg')
image2 = cv2.imread('image2.jpg')
# 创建特征点检测器和特征描述子计算器
detector = cv2.FeatureDetector_create("ORB")
descriptor = cv2.DescriptorExtractor_create("ORB")
# 检测特征点并计算描述子
keypoints1 = detector.detect(image1)
keypoints1, descriptors1 = descriptor.compute(image1, keypoints1)
keypoints2 = detector.detect(image2)
keypoints2, descriptors2 = descriptor.compute(image2, keypoints2)
# 创建匹配器
matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# 特征点匹配
matches = matcher.match(descriptors1, descriptors2)
# 使用RANSAC算法进行外点剔除
src_points = np.float32([keypoints1[m.queryIdx].pt for m in matches]).reshape(-1, 1, 2)
dst_points = np.float32([keypoints2[m.trainIdx].pt for m in matches]).reshape(-1, 1, 2)
mask = cv2.findHomography(src_points, dst_points, cv2.RANSAC, 5.0)[1]
# 保留内点
matches_filtered = [m for m, mask_value in zip(matches, mask) if mask_value]
# 绘制匹配结果
image_matches = cv2.drawMatches(image1, keypoints1, image2, keypoints2, matches_filtered, None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
cv2.imshow('Matches', image_matches)
cv2.waitKey(0)
cv2.destroyAllWindows()
以上代码中,首先读取两张图像,并创建特征点检测器和特征描述子计算器。然后使用这些工具检测特征点并计算对应的描述子。接下来,使用匹配器进行特征点匹配。最后,利用RANSAC算法进行外点剔除,保留内点,并绘制匹配结果。
需要注意的是,RANSAC算法是一种鲁棒性较高的外点剔除方法,通过计算单应性矩阵来判断特征点匹配的准确性。在代码中,我们使用cv2.findHomography()函数计算单应性矩阵,并根据阈值(5.0)来判断内点和外点。根据实际需求,您可以调整阈值来控制内点的数量。
五、多尺度特征提取示例代码
 多尺度特征提取是一种常用的方法,可以增强对尺度变化的鲁棒性。下面是一个示例代码,展示了如何使用金字塔SIFT进行多尺度特征提取:
多尺度特征提取是一种常用的方法,可以增强对尺度变化的鲁棒性。下面是一个示例代码,展示了如何使用金字塔SIFT进行多尺度特征提取:
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 创建SIFT对象
sift = cv2.xfeatures2d.SIFT_create()
# 构建图像金字塔
pyramid = [image]
for i in range(3):
image = cv2.pyrDown(image)
pyramid.append(image)
# 在每个尺度上提取特征点和计算描述子
keypoints = []
descriptors = []
for level, img in enumerate(pyramid):
kp, desc = sift.detectAndCompute(img, None)
for k in kp:
k.pt = (k.pt[0] * (2 ** level), k.pt[1] * (2 ** level))
keypoints.extend(kp)
descriptors.append(desc)
# 绘制特征点
image_with_keypoints = cv2.drawKeypoints(pyramid[-1], keypoints, None, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv2.imshow('Image with Keypoints', image_with_keypoints)
cv2.waitKey(0)
cv2.destroyAllWindows()
以上代码中,首先读取图像,并创建SIFT对象。然后使用cv2.pyrDown()函数构建图像金字塔,降采样图像并存储在pyramid列表中。接下来,在每个尺度上使用SIFT对象的detectAndCompute()函数提取特征点和计算描述子,并将特征点的坐标乘以相应的尺度因子进行调整。最后,将特征点绘制在原始图像的最底层金字塔图像上,并显示出来。
需要注意的是,金字塔SIFT方法通过降采样图像来实现多尺度特征提取。在示例代码中,我们使用cv2.pyrDown()函数进行图像降采样,每次降低一倍分辨率。您可以根据需求调整金字塔层数和降采样因子。
六、非局部特征描述子示例代码
 非局部特征描述子,如Bag-of-Features(BoF)和Fisher Vectors,可以更好地捕捉整体图像的特征信息。以下是一个示例代码,展示了如何使用OpenCV进行BoF特征提取:
非局部特征描述子,如Bag-of-Features(BoF)和Fisher Vectors,可以更好地捕捉整体图像的特征信息。以下是一个示例代码,展示了如何使用OpenCV进行BoF特征提取:
import cv2
import numpy as np
# 读取图像
image1 = cv2.imread('image1.jpg')
image2 = cv2.imread('image2.jpg')
# 创建SIFT对象
sift = cv2.xfeatures2d.SIFT_create()
# 提取特征点和计算描述子
keypoints1, descriptors1 = sift.detectAndCompute(image1, None)
keypoints2, descriptors2 = sift.detectAndCompute(image2, None)
# 创建词袋模型
dictionary_size = 100 # 设置词典大小
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 10, 0.01)
flags = cv2.KMEANS_RANDOM_CENTERS
_, labels, centers = cv2.kmeans(descriptors1, dictionary_size, None, criteria, 10, flags)
# 计算图像的BoF特征向量
histogram1 = np.zeros((1, dictionary_size), dtype=np.float32)
for label in labels:
histogram1[0, label] += 1
# 规范化特征向量
histogram1 /= np.sum(histogram1)
# 对第二张图像进行相同的操作,计算其BoF特征向量
_, labels, _ = cv2.kmeans(descriptors2, dictionary_size, None, criteria, 10, flags)
histogram2 = np.zeros((1, dictionary_size), dtype=np.float32)
for label in labels:
histogram2[0, label] += 1
histogram2 /= np.sum(histogram2)
# 计算两个图像的相似性(使用直方图相交)
similarity = cv2.compareHist(histogram1, histogram2, cv2.HISTCMP_INTERSECT)
print('Similarity:', similarity)
以上代码中,首先读取两张图像,并创建SIFT对象。然后使用detectAndCompute()函数提取特征点和计算描述子。接下来,使用K均值聚类算法构建词袋模型,并将描述子分配到相应的词袋中心。然后,根据每个图像的词袋分配结果计算BoF特征向量,并进行规范化处理。最后,使用compareHist()函数计算两个图像的相似性,这里使用的是直方图相交作为相似性度量。
需要注意的是,以上代码只是一个简单示例,展示了如何使用BoF特征提取方法。在实际应用中,可能需要更复杂的流程和更大的词典大小来捕捉更丰富的特征信息。
七、基于深度学习的特征提取示例代码
 基于深度学习的特征提取可以利用预训练的卷积神经网络(CNN)模型来提取图像特征。以下是一个示例代码,展示了如何使用OpenCV的DNN模块和预训练的VGG16模型进行特征提取:
基于深度学习的特征提取可以利用预训练的卷积神经网络(CNN)模型来提取图像特征。以下是一个示例代码,展示了如何使用OpenCV的DNN模块和预训练的VGG16模型进行特征提取:
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 加载预训练的VGG16模型
model_file = 'vgg16.caffemodel'
config_file = 'vgg16.prototxt'
net = cv2.dnn.readNetFromCaffe(config_file, model_file)
# 图像预处理
blob = cv2.dnn.blobFromImage(image, 1.0, (224, 224), (104.0, 177.0, 123.0), swapRB=True, crop=False)
# 设置输入并前向传播
net.setInput(blob)
features = net.forward()
# 提取特征向量
feature_vector = np.squeeze(features)
# 打印特征向量的形状
print('Feature vector shape:', feature_vector.shape)
以上代码中,首先读取图像,并加载预训练的VGG16模型。然后使用cv2.dnn.blobFromImage()函数对图像进行预处理,将其转换为网络所需的输入格式。接下来,将预处理后的图像输入到网络中,并通过前向传播获取特征向量。最后,使用np.squeeze()函数将特征向量的维度从(1, N)调整为(N,)。
需要注意的是,示例代码中使用的VGG16模型是基于Caffe框架训练的。您需要下载相应的模型文件(.caffemodel)和配置文件(.prototxt),并将其与代码放置在同一目录下。您也可以根据需要选择其他预训练的深度学习模型,并相应地修改代码。
八、自定义特征提取示例代码
 自定义特征提取是根据自己的需求和问题,开发和实现适合的特征提取算法。以下是一个示例代码,展示了如何使用OpenCV进行自定义特征提取:
自定义特征提取是根据自己的需求和问题,开发和实现适合的特征提取算法。以下是一个示例代码,展示了如何使用OpenCV进行自定义特征提取:
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 自定义特征提取函数
def custom_feature_extraction(image):
# 在这里编写你的自定义特征提取代码
# 可以使用OpenCV提供的图像处理函数和工具
# 返回提取到的特征向量或特征描述子
pass
# 调用自定义特征提取函数
features = custom_feature_extraction(image)
# 打印特征向量或特征描述子
print('Features:', features)
以上代码中,首先读取图像,并定义一个自定义特征提取函数custom_feature_extraction()。在该函数中,您可以根据自己的需求编写特征提取的代码,使用OpenCV提供的图像处理函数和工具。最后,调用自定义特征提取函数,并打印提取到的特征向量或特征描述子。
需要注意的是,自定义特征提取的具体实现会根据您的任务和需求而有所不同。您可以根据自己的问题,在自定义特征提取函数中添加相应的图像处理、特征计算等操作。这个示例代码只是一个框架,需要您根据具体情况进行修改和完善。
九、归纳总结
 OpenCV是一个强大的计算机视觉库,提供了许多用于图像特征提取和描述的功能。下面是一些常用的OpenCV图像特征提取和描述方法的总结:
OpenCV是一个强大的计算机视觉库,提供了许多用于图像特征提取和描述的功能。下面是一些常用的OpenCV图像特征提取和描述方法的总结:
-
Harris角点检测(cv2.cornerHarris):用于检测图像中的角点,通过计算图像局部区域的角点响应函数值来确定角点位置。
-
Shi-Tomasi角点检测(cv2.goodFeaturesToTrack):改进的角点检测算法,通过选择响应函数最大的角点来提取特征点。
-
SIFT特征提取与匹配(cv2.xfeatures2d.SIFT_create):通过检测尺度空间上的极值点,提取具有旋转和尺度不变性的特征点,并计算其描述子进行匹配。
-
SURF特征提取与匹配(cv2.xfeatures2d.SURF_create):加速的特征检测和描述算法,可以实现快速特征提取和匹配。
-
ORB特征提取与匹配(cv2.ORB_create):具有尺度和旋转不变性的二进制特征描述子,适用于实时应用。
-
FAST特征检测(cv2.FastFeatureDetector_create):高速特征检测算法,用于提取图像中的角点。
-
BRIEF特征描述子(cv2.xfeatures2d.BriefDescriptorExtractor_create):基于二进制的特征描述子,适用于快速特征匹配。
-
AKAZE特征提取与匹配(cv2.AKAZE_create):具有尺度和旋转不变性的加速特征检测和描述算法。
-
HOG特征提取(cv2.HOGDescriptor):用于目标检测和行人识别等任务的特征提取方法,基于局部图像梯度方向直方图。
-
GFTT特征检测(cv2.GFTTDetector_create):改进的角点检测算法,用于提取具有较好鲁棒性和重复性的特征点。
 以上是一些常用的OpenCV图像特征提取和描述方法的总结。每种方法都有其适用的场景和优缺点,根据具体的任务需求选择合适的方法进行特征提取和描述。
以上是一些常用的OpenCV图像特征提取和描述方法的总结。每种方法都有其适用的场景和优缺点,根据具体的任务需求选择合适的方法进行特征提取和描述。
希望以上总结对您有所帮助!如果还有其他问题,请随时提问。
标签:
相关文章
最新发布
- 光流法结合深度学习神经网络的原理及应用(完整代码都有Python opencv)
- Python 图像处理进阶:特征提取与图像分类
- 大数据可视化分析-基于python的电影数据分析及可视化系统_9532dr50
- 【Python】入门(运算、输出、数据类型)
- 【Python】第一弹---解锁编程新世界:深入理解计算机基础与Python入门指南
- 华为OD机试E卷 --第k个排列 --24年OD统一考试(Java & JS & Python & C & C++)
- Python已安装包在import时报错未找到的解决方法
- 【Python】自动化神器PyAutoGUI —告别手动操作,一键模拟鼠标键盘,玩转微信及各种软件自动化
- Pycharm连接SQL Sever(详细教程)
- Python编程练习题及解析(49题)
点击排行
- 版本匹配指南:Numpy版本和Python版本的对应关系
- 版本匹配指南:PyTorch版本、torchvision 版本和Python版本的对应关系
- Anaconda版本和Python版本对应关系(持续更新...)
- Python 可视化 web 神器:streamlit、Gradio、dash、nicegui;低代码 Python Web 框架:PyWebIO
- 相关性分析——Pearson相关系数+热力图(附data和Python完整代码)
- Windows上安装 Python 环境并配置环境变量 (超详细教程)
- Python与PyTorch的版本对应
- Python pyinstaller打包exe最完整教程
本站推荐
