首页 > Python资料 博客日记
[python] 罗技动态链接驱动库DLL 控制 键鼠
2024-03-17 08:00:04Python资料围观463次
Python资料网推荐[python] 罗技动态链接驱动库DLL 控制 键鼠这篇文章给大家,欢迎收藏Python资料网享受知识的乐趣
[python] 罗技动态链接驱动库DLL 控制 键鼠
- 最近在玩搬砖游戏晶核, 每天有很多重复繁琐的"打卡"操作, 得知隔壁御三家游戏就有大佬做了自动收割的辅助工具,我就想模仿写一个.
- 不过大佬们写的开源工具厉害得多,加了神经网络自动识别,实现寻路和点击功能.我目前最多就是实现一个简单连点器加色块识别而已,而且这种原始手动的方法很不方便,我原本还想着写个表格导入操作功能.最后也不了了之了.太懒了.
- << Python调用罗技驱动实现功能 >> https://www.python100.com/html/1S27NYQO8H34.html
- << FPS游戏自动枪械识别+压枪(以PUBG为例) >> https://blog.csdn.net/weixin_37827742/article/details/124242964
- << AimLab OPENCV开源(包含Sendinput + Fov等代码) >> https://www.bilibili.com/video/BV1q34y1e7ic/
一、准备工作
- 需要安装
python 3.8.10 64位带IDLE的版本. 因为我会使用pyautogui来获取屏幕分辨率等操作,使用tkinter来创建简易弹窗提示操作; - 如果你只需要控制鼠标的话就不需要上述2个软件包,不然最好和我一样的python版本,32位或是版本太新太久都不支持
pyautogui,或者使用其他软件包代替也可以.tkinter软件包是安装IDLE时自带的,不能手动安装,只能通过安装IDLE来安装,很奇怪.我尝试了很久得出这样一个个结论. - 本教程使用的是动态链接驱动库是罗技的
LGS_9.02.65_x64_Logitech.exe版本, 注意不能是其他版本,不然对不上,先安装这个驱动程序,那动态链接库才有效果.安装完成后的软件界面是这样的:
- 最后在程序中加载
dll文件, 就可以驱动键鼠了.该软件只需要开机打开一次即可.打开后退出也会继续生效.但是关机重启后又失效,所以开机后要打开一次,之后关闭退出就行. - 另外关于
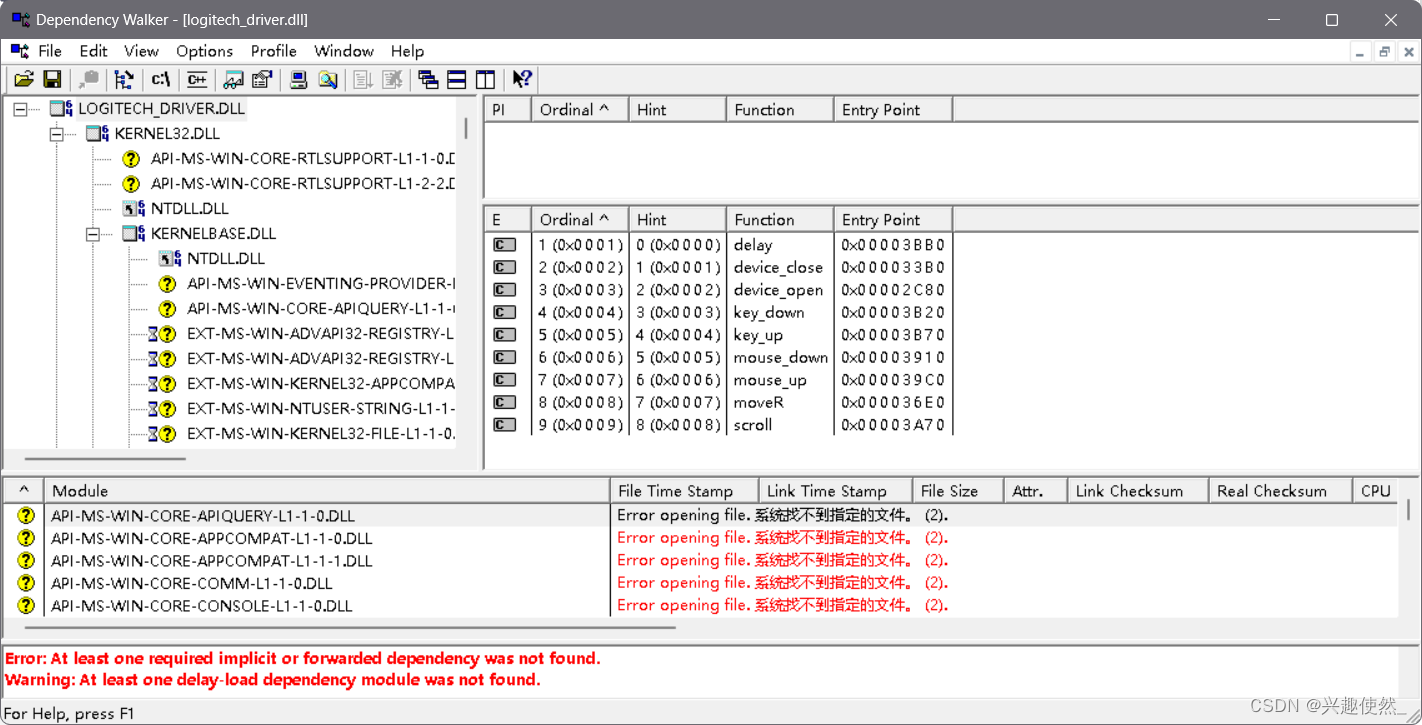
dll文件,第一次接触的人可能不懂是什么,没关系,因为我也不懂是啥.不过不影响使用,dll有点像别人打包好的库,具有一些函数,你导入到自己的.py后,就可以直接使用这些函数.使用一些工具depends22_x64可以查看dll打包了什么函数,这里我只会通过名字和实践猜测每个函数的功能.
- 注意!!! 不同地方下载的
dll文件可能是不同人打包的,可能函数名或函数功能不太一样.
二、开始敲代码
1. 框架
- 先写个基本框架, 里面包含了开头注释, 软件包导入, 打印函数打包, pid函数打包, 主函数打包; 一个等待填写的空类;
"""
时间 : 2023年12月30日 07:34:48
作者 : Lovely_him
说明 : 兴趣使然
"""
#!/usr/bin/env python3
import sys
import win32api
import os # 获取文件路径
import time # 获取时间和延时
import ctypes # 调用dll文件
import tkinter as tk # python 内置库,需要安装时勾选安装IDE才会安装,坑爹
import threading # 多线程
import pyautogui # 获取屏幕鼠标坐标
import random # 随机数
def print_tkui(strs):
""" 打包控制台输出 """
print(strs)
class PID:
"""PID"""
def __init__(self, P=0.35, I=0, D=0):
"""PID"""
self.kp = P # 比例
self.ki = I # 积分
self.kd = D # 微分
self.uPrevious = 0 # 上一次控制量
self.uCurent = 0 # 这一次控制量
self.setValue = 0 # 目标值
self.lastErr = 0 # 上一次差值
self.errSum = 0 # 所有差值的累加
self.errSumLimit = 10 # 近两次的差值累加
def pidPosition(self, setValue, curValue):
"""位置式 PID 输出控制量"""
self.setValue = setValue # 更新目标值
err = self.setValue - curValue # 计算差值, 作为比例项
dErr = err - self.lastErr # 计算近两次的差值, 作为微分项
self.errSum += err # 累加这一次差值,作为积分项
outPID = (self.kp * err) + (self.ki * self.errSum) + (self.kd * dErr) # PID
self.lastErr = err # 保存这一次差值,作为下一次的上一次差值
return outPID # 输出
def pidIncrease(self, setValue, curValue):
"""增量式 PID 输出控制量的差值"""
self.uCurent = self.pidPosition(setValue, curValue) # 计算位置式
outPID = self.uCurent - self.uPrevious # 计算差值
self.uPrevious = self.uCurent # 保存这一次输出量
return outPID # 输出
class LOGITECH:
"""罗技动态链接库"""
pass
def Mymain():
""" 主函数 """
pass
if __name__ == "__main__":
""" 主运行 """
Mymain()
2. 导入
- 然后开始往空类里填写内容, 第一步导入
dll文件,直接写在类的开头,只要这个类被导入,那就导入文件作准备.注意,我还添加了几个局部的常量,用于判断后续的保护措施. - 记得注意路径是否正确,还有提前打开罗技驱动软件.成功执行运行就会有以下提示
class LOGITECH:
"""罗技动态链接库"""
try:
file_path = os.path.abspath(os.path.dirname(__file__)) # 当前路径
dll = ctypes.CDLL(f'{file_path}/logitech_driver.dll') # 打开路径文件
state = (dll.device_open() == 1) # 启动, 并返回是否成功
WAIT_TIME = 0.5 # 等待时间
RANDOM_NUM = 0.1 # 最大时间随机数
if not state:
print('错误, 未找到GHUB或LGS驱动程序')
except FileNotFoundError:
print(f'错误, 找不到DLL文件')
def __init__(self) -> None:
pass
3. 鼠标点击
- 然后开始逐一打包调用
dll库内的函数,实现功能; 先是鼠标按下和松开,合并为点击的功能;为了模拟真实点击,我加了按下后随机延时再松开.
@classmethod
def mouse_down(self, code):
""" 鼠标按下 code: 左 中 右 """
if not self.state:
return
print_tkui(f'按下{code}键')
if code == '左':
code = 1
elif code == '中':
code = 2
elif code == '右':
code = 3
else: # 默认
code = 1
self.dll.mouse_down(code)
@classmethod
def mouse_up(self, code):
""" 鼠标松开 code: 左 中 右 """
if not self.state:
return
print_tkui(f'松开{code}键')
if code == '左':
code = 1
elif code == '中':
code = 2
elif code == '右':
code = 3
else: # 默认
code = 1
self.dll.mouse_up(code)
@classmethod
def mouse_click(self, code, wait_time=0):
""" 鼠标点击 code: 左 中 右 """
if wait_time == 0: # 如果没有规定等待时间
wait_time = self.WAIT_TIME # 默认等待时间
if wait_time != 0: # 如果等待时间不是0
wait_time += random.uniform(0, self.RANDOM_NUM)
time.sleep(wait_time) # 延时时间,秒,生成随机小数0~1.0
if not self.state:
return
print_tkui(f'等待{wait_time:.2f}秒后, 点击{code}键')
if code == '左':
code = 1
elif code == '中':
code = 2
elif code == '右':
code = 3
else: # 默认
code = 1
self.dll.mouse_down(code)
time.sleep(random.uniform(0, self.RANDOM_NUM)) # 延时时间,秒,生成随机小数0~1.0
self.dll.mouse_up(code)
4. 键盘点击
- 和鼠标点击相似, 键盘点击也一样, 有按下和松开组合.
@classmethod
def key_down(self, code):
"""键盘下去 code: 'a'-'z':A-Z, '0'-'9':0-9"""
if not self.state:
return
print_tkui(f'按下{code}键')
self.dll.key_down(code)
@classmethod
def key_up(self, code):
"""键盘起来 code: 'a'-'z':A-Z, '0'-'9':0-9"""
if not self.state:
return
print_tkui(f'松开{code}键')
self.dll.key_up(code)
@classmethod
def key_click(self, code, wait_time=0, time_down=0):
"""键盘点击 code: 'a'-'z':A-Z, '0'-'9':0-9"""
if wait_time == 0: # 如果没有规定等待时间
wait_time = self.WAIT_TIME # 默认等待时间
if wait_time != 0: # 如果等待时间不是0
wait_time += random.uniform(0, self.RANDOM_NUM)
time.sleep(wait_time) # 延时时间,秒,生成随机小数0~1.0
if time_down != 0: # 如果有长按时间,就会变成长按
wait_time = 0
if not self.state: # 保护措施
return
print_tkui(f'等待{wait_time:.2f}秒后, 点击{code}键, 长按时间{time_down:.2f}')
self.dll.key_down(code)
time.sleep(wait_time + time_down +random.uniform(0, self.RANDOM_NUM)) # 延时时间,秒,生成随机小数0~1.0, 不可以延时,
self.dll.key_up(code)
5. 鼠标移动
- 然后是比较抽象的鼠标移动, 它的函数输入是移动量, 就是模拟实际鼠标的移动距离, 而不是屏幕鼠标的移动距离. 屏幕鼠标的移动距离受电脑设置的鼠标速度, 和实际鼠标的cpi有很大关系. 实际我们使用的时候, 肯定只希望以屏幕作为参考系,在屏幕上以坐标移动.所以我打包了一下,使用pid自动调节的方式,实现输入屏幕坐标,鼠标移动到相应坐标位置;
@classmethod
def mouse_move(self, end_xy, wait_time=0, min_xy=2, min_time=0.1):
"""
等待多久后 缓慢移动 \n
end_x 绝对横坐标 \n
end_y 绝对纵坐标 \n
time_s 等待时间 \n
min_xy 最小移动控制量 \n
min_time 最小移动时间 \n
"""
if wait_time == 0: # 如果没有规定等待时间
wait_time = self.WAIT_TIME # 默认等待时间
if wait_time != 0: # 如果等待时间不是0
wait_time += random.uniform(0, self.RANDOM_NUM)
time.sleep(wait_time) # 延时时间,秒,生成随机小数0~1.0
if not self.state: # 保护措施
return
end_x, end_y = end_xy
print_tkui(f'等待{wait_time:.2f}秒后, 移动到坐标{(end_x, end_y)}')
pid_x = PID() # 创建pid对象
pid_y = PID()
while True: # 循环控制鼠标直到重合坐标
time.sleep(min_time) # 延时时间,秒,生成随机小数0~1.0
new_x, new_y = pyautogui.position() # 获取当前鼠标位置
move_x = pid_x.pidPosition(end_x, new_x) # 经过pid计算鼠标运动量
move_y = pid_y.pidPosition(end_y, new_y)
# print(f'x={new_x}, y={new_y}, xd={move_x}, yd={move_y}')
if end_x == new_x and end_y == new_y: # 如果重合就退出循环
break
if move_x > 0 and move_x < (min_xy): # 限制正最小值
move_x = (min_xy)
elif move_x < 0 and move_x > -(min_xy): # 限制负最小值
move_x = -(min_xy)
else:
move_x = int(move_x) # 需要输入整数,小数会报错
if move_y > 0 and move_y < (min_xy):
move_y = (min_xy)
elif move_y < 0 and move_y > -(min_xy):
move_y = -(min_xy)
else:
move_y = int(move_y)
self.dll.moveR(move_x, move_y, True) # 貌似有第三个参数,但是没试出来什么用
6. 鼠标滚轮
- 同理, 最后还有一个鼠标滚轮的滚动, 它也是模拟滚动量, 这个就不太好跟踪, 因为不同页面滚动范围不一样, 而且这个功能用得很少. 我考虑的是在有滚动条的情况下,使用鼠标点击滚动条或拖拽滚动条, 是更加稳妥的操作,所以我只写了个简单的调用;
@classmethod
def mouse_scroll(self, num):
""" 鼠标滚轮 num : 正数向下, 负数向上 """
if not self.state:
return
if num > 0:
str_scroll = '下'
elif num < 0:
str_scroll = '上'
else: # 保护措施
return
print_tkui(f'滚轮{str_scroll}转动{num}单位')
self.dll.scroll(num) # 鼠标滚轮
7. 总结
-
自此,
dll驱动库内的0~9序号,10个函数中, 后8个函数的功能都实现了.第0个delay,应该是延时,使用python自带的更加方便,所以没有用. 第1个device_close应该是和第2个device_open相对应的,属于关闭模块,但我尝试了一下没成功,考虑到别人写的例程,也是一开始就导入了dll并调用了dll.device_open,后续并没有考虑关闭,也不需要关闭,所以我也写在类开头,导入类就导入dll并打开,不考虑关闭. -
大致功能就上面这些了, 然后使用最原始的方式实现连点器功能.我原本还打算写个连点器操作表格导入功能, 将操作罗列,然后执行持续识别表格,开始设置的操作.我尝试一下后就放弃了,这种方法太原始了,现在应该采用更加智能的ai识别才对.而不是输入固定坐标点移动.
-
笔记到这里, 结束.
版权声明:本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若内容造成侵权/违法违规/事实不符,请联系邮箱:jacktools123@163.com进行投诉反馈,一经查实,立即删除!
标签:
相关文章
最新发布
- 光流法结合深度学习神经网络的原理及应用(完整代码都有Python opencv)
- Python 图像处理进阶:特征提取与图像分类
- 大数据可视化分析-基于python的电影数据分析及可视化系统_9532dr50
- 【Python】入门(运算、输出、数据类型)
- 【Python】第一弹---解锁编程新世界:深入理解计算机基础与Python入门指南
- 华为OD机试E卷 --第k个排列 --24年OD统一考试(Java & JS & Python & C & C++)
- Python已安装包在import时报错未找到的解决方法
- 【Python】自动化神器PyAutoGUI —告别手动操作,一键模拟鼠标键盘,玩转微信及各种软件自动化
- Pycharm连接SQL Sever(详细教程)
- Python编程练习题及解析(49题)
点击排行
- 版本匹配指南:Numpy版本和Python版本的对应关系
- 版本匹配指南:PyTorch版本、torchvision 版本和Python版本的对应关系
- Python 可视化 web 神器:streamlit、Gradio、dash、nicegui;低代码 Python Web 框架:PyWebIO
- 相关性分析——Pearson相关系数+热力图(附data和Python完整代码)
- Anaconda版本和Python版本对应关系(持续更新...)
- Python与PyTorch的版本对应
- Windows上安装 Python 环境并配置环境变量 (超详细教程)
- Python pyinstaller打包exe最完整教程
本站推荐
